The UAV's flight sensing technology is mainly used for two purposes. One of them is provided to the flight control system. Since the main function of the flight control system is to control the aircraft to reach the desired attitude and spatial position, this part of the sensing technology mainly measures aircraft motion. State-related physical quantities, including modules such as gyroscopes, accelerometers, magnetic compasses, barometers, GNSS modules, and optical flow modules. Another use is to provide autonomous navigation systems for drones, that is, paths and obstacle avoidance planning systems, so it is necessary to sense the surrounding environment, such as the location of obstacles. Related modules include ranging modules and object detection and tracking modules. .
Gyro
Currently, commercial drones commonly use MEMS technology gyroscopes because they are small in size and inexpensive, and can be packaged in the form of ICs. MEMS gyroscopes are commonly used to measure the angular rate of rotation of the body around its own axis. Commonly used models are 6050A (Invensense), ADXRS290 (ADI). The indicators for measuring gyroscope performance include measurement range (range), sensitivity, stability (drift). And signal to noise ratio and so on.

The above is a graph of the temperature drift test of the gyroscope. The test environment is from 25 ° C to 50 ° C. The gyroscope is kept stationary during the whole process. The accurate output of the gyroscope should be a fixed value. But from the results, the actual output of both sensors is affected by temperature changes. In comparison, the output value of the ADXRS290 (ADI) varies little, basically around 0.5.
Accelerometer
The accelerometer measures the linear acceleration of the body's motion, but due to the gravity of the Earth, the measured value will also contain the gravitational acceleration component, which should be subtracted in some use cases. Commonly used MEMS accelerometer sensors are available in 6050A (Invensense) and ADXL350 (ADI). In order to improve chip integration, some sensor manufacturers will package the gyroscope and accelerometer together, called a six-axis sensor, such as 6050A (Invensense).
Magnetic compass
The physical quantity measured by the magnetic compass is the component of the earth's magnetic field strength along the axis of the body, and the heading angle of the body is calculated accordingly. Commonly used MEMS magnetic compass sensors are HMC5983L (Honeywell) and QMC5883L (Hoover), the performance of which is similar, the former has been discontinued. The main performance parameters of the magnetic compass include sensitivity, stability (drift) and so on.
Barometer
The physical quantity measured by the barometer is the atmospheric pressure value from which the absolute altitude can be calculated. Commonly used barometer sensor models include MS5611 (MEAS), MS5607 (MEAS), and BMP180 (Bosch). The problem with the use of the barometer during use is that when flying near the ground, the presence of the "ground effect" causes the gas pressure distribution around the aircraft to be different from the atmosphere at rest, making it impossible to measure the altitude with a barometer. The usual solution is to use other sensors, such as ultrasonic sensors or laser rangefinders, when taking off or landing.
GNSS module
The physical quantities measured by the GNSS module are relatively abundant, including geographic coordinates (latitude and longitude), altitude, line speed, and heading angle (RTK system). Commonly used GNSS module manufacturers include U-BLOX in Switzerland and NOVATEL in Canada. When using the GNSS module, the placement of the satellite signal receiving antenna needs to pay attention to the shielding of electromagnetic interference. Some powerful machine manufacturers will customize the satellite signal receiving antenna according to the aircraft model.
Optical flow module
The optical flow module is a special module that can be used to sense the motion state of the body, such as measuring the displacement speed in the horizontal direction. It can also be used to sense the surrounding environment and be used as an obstacle avoidance. The more common optical flow module is the open source PX4FLOW. The optical flow module is usually used indoors, mainly to solve the problem of poor indoor satellite signals, and a certain texture pattern is required for the ground of the shooting.
Ambient state perception
Ranging module
Here are five commonly used ranging modules: ultrasonic, infrared TOF, laser, millimeter wave radar, depth-sensing camera.

The performance of ultrasonic and infrared TOF is similar, for example, the measurement distance is relatively close, and the distance measured by ultrasonic is generally about 4 meters. In addition, the range of use of these two sensors is easily limited by the actual environment. For example, the infrared TOF emits red light and reflects on the surface of the object to be measured. If an object with a low red reflectance is encountered, the glass will fail. But the biggest advantage of these two sensors is the low cost and the small size of the module, so it is widely used in consumer drones.
Lidar ranging is generally far away, most products can reach more than 100 meters, but the weather conditions of heavy rain and fog will affect its measurement results. Another disadvantage is the high cost: Velodyne, the strongest in the laser radar industry, has a VLP-16 that is suitable for drones and has a price of more than $1,000. Said that the cost is still relatively high.
The depth-aware camera can be divided into three types according to the measurement technology. The stereo camera is also called binocular vision technology. The representative product is the Elves of Dajiang 4; the structured light technology, which represents Microsoft's Kinect; Time Difference Ranging Technology (TOF), Due to the small number of manufacturers and the high cost, there are few applications on drones. Depth-aware cameras also have limitations when used. The disadvantage of binocular vision technology is that it does not work properly in low-light environments, while structured light technology does not work properly under strong light. Therefore, some manufacturers combine the two technologies to make up for each other's defects and expand the applicable environmental scope.
Method for improving measurement accuracy
Sensor calibration
Sensor calibration, including fine calibration and coarse calibration. Fine calibration works better, but requires expensive calibration equipment; rough calibration does not require external equipment, only the sensor itself can be operated.
Taking the coarse calibration of the magnetic compass as an example, since the geomagnetic field strength at any position on the earth can be regarded as constant over a long time span, when the magnetic compass is rotated, the magnetic compass can be fixed according to the relative motion, and The geomagnetic field vector is rotated, and the trajectory of the vector end point in space should be a standard sphere. However, due to the error of the sensor, the actual measured data is not strictly on the surface of the sphere, so it needs to be measured according to the The value and the known exact value are used to calculate the conversion relationship between the two, which is the error model of the magnetic compass. When the magnetic compass is used later, the measured value can be processed according to the error model obtained by the rough calibration, so that the error of the measured value is reduced.

Magnetic compass calibration (SGB sbgcenter)
Multiple sensor data fusion
There are many different types of sensor data fusion methods. It is common in the industry and the effect is better. It is EKF, which is extended Kalman filter.
Taking the fusion method of calculating the attitude angle of the aircraft as an example, the EKF update process is mainly divided into two parts, prediction update and measurement update. The predictive update mainly uses the gyroscope to update the predicted state quantity and simultaneously calculates the covariance matrix of the state quantity. In the measurement update, the filter gain is calculated first, and then the filter gain is used to predict the state quantity, the accelerometer and the magnetic compass data to become a fusion state quantity, and the covariance matrix of the fusion state quantity is calculated at the next update period. Used in.
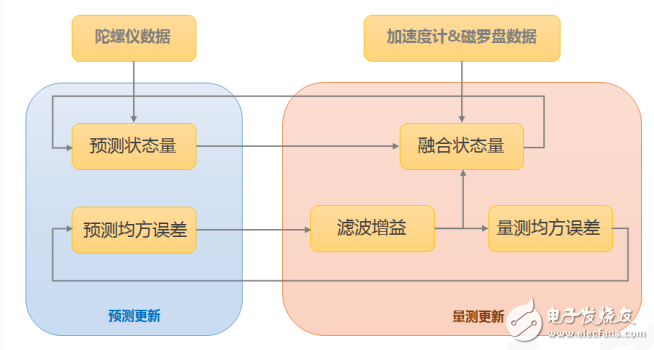
Method for calculating the fusion angle of the attitude angle
Sensor redundancy design
The sensor redundancy design is mainly to combine multiple sensors of the same kind. The processing method is to first remove the sensor with abnormal data and then fuse the sensor. The redundant design not only improves the measurement accuracy but also improves the reliability of the entire system. When a certain sensor fails, the entire system can continue to work normally.
Pond Bio Press Filters,Pond Filters,Fish Farm Drum Filter,External Fish Tank Filters
Sensen Group Co., Ltd.  , https://www.sunsunglobal.com