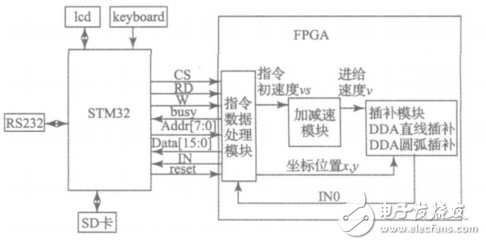
Figure 1: System Principle
The STM32 reads data from an SD card and performs necessary algorithmic processing. The initial speed, maximum speed, acceleration values, and other control parameters are set via a keyboard scanning circuit. These settings are then sent to the FPGA for further processing. The FPGA controls the output pulses and the time between them, which are isolated through a high-speed optocoupler to drive the motors. Communication with the host computer is achieved via RS232, while an LCD interface enables human-computer interaction. The FPGA handles key functions such as command and data processing, acceleration/deceleration control, and interpolation algorithms (including linear and circular interpolation). **2. Implementation of Motion Control Algorithm in FPGA** **2.1. Implementation of Speed Control Algorithm in FPGA** To prevent over-travel, impact, or oscillation during startup, movement, or speed changes, smooth and accurate positioning of the moving mechanism is crucial. This requires a controlled acceleration and deceleration process for each axis. Most motion control systems use either trapezoidal or S-shaped acceleration profiles. Due to its simplicity, fast response, and efficiency, this project improves upon the traditional trapezoidal method to achieve pulse-based control. The trapezoidal acceleration/deceleration algorithm uses a pulse superposition technique, implemented within the FPGA. It divides a reference clock into n parts, generating n non-overlapping pulses of different frequencies. By combining these pulses using equation (1), the system can produce continuously adjustable frequency outputs for smooth acceleration and deceleration. Equation (1):
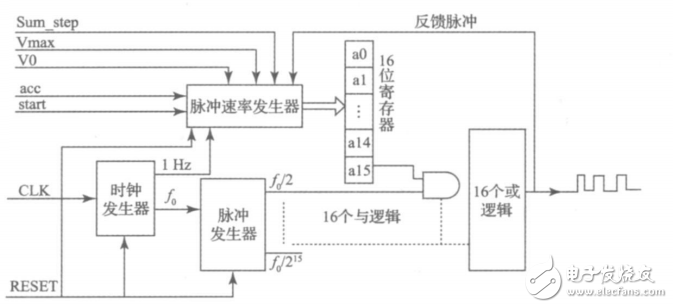
Figure 2: System Logic Structure Circuit
When you think of the screen protectors of old, you're probably thinking of TPU. It's a flexible plastic that's a huge hassle to install . it's flexible, so it can go edge-to-edge on any phone, it has better impact protection than PET, and it has limited "self-healing" powers for small scratches. Brands like TUOLI offer TPU at very affordable prices,
On the other hand, TUOLI's comes in a few different styles depending on the look, feel, and features you want.
Tpu Screen Protector,Hydrogel Protective Film,Mobile Phone Screen Protector,Tpu Hydrogel Film,hydrogel protector, hydrogel sheet
Shenzhen TUOLI Electronic Technology Co., Ltd. , https://www.tlhydrogelprotector.com